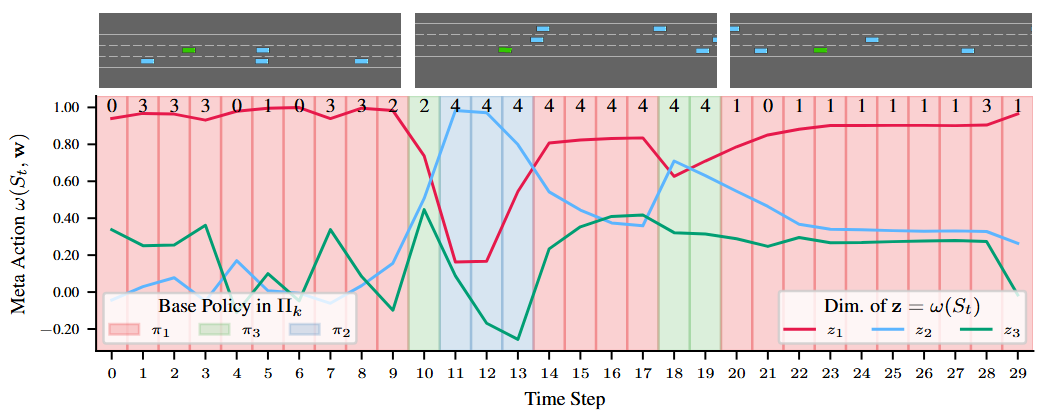
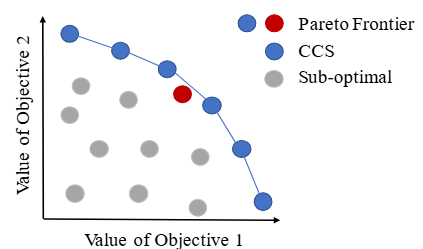
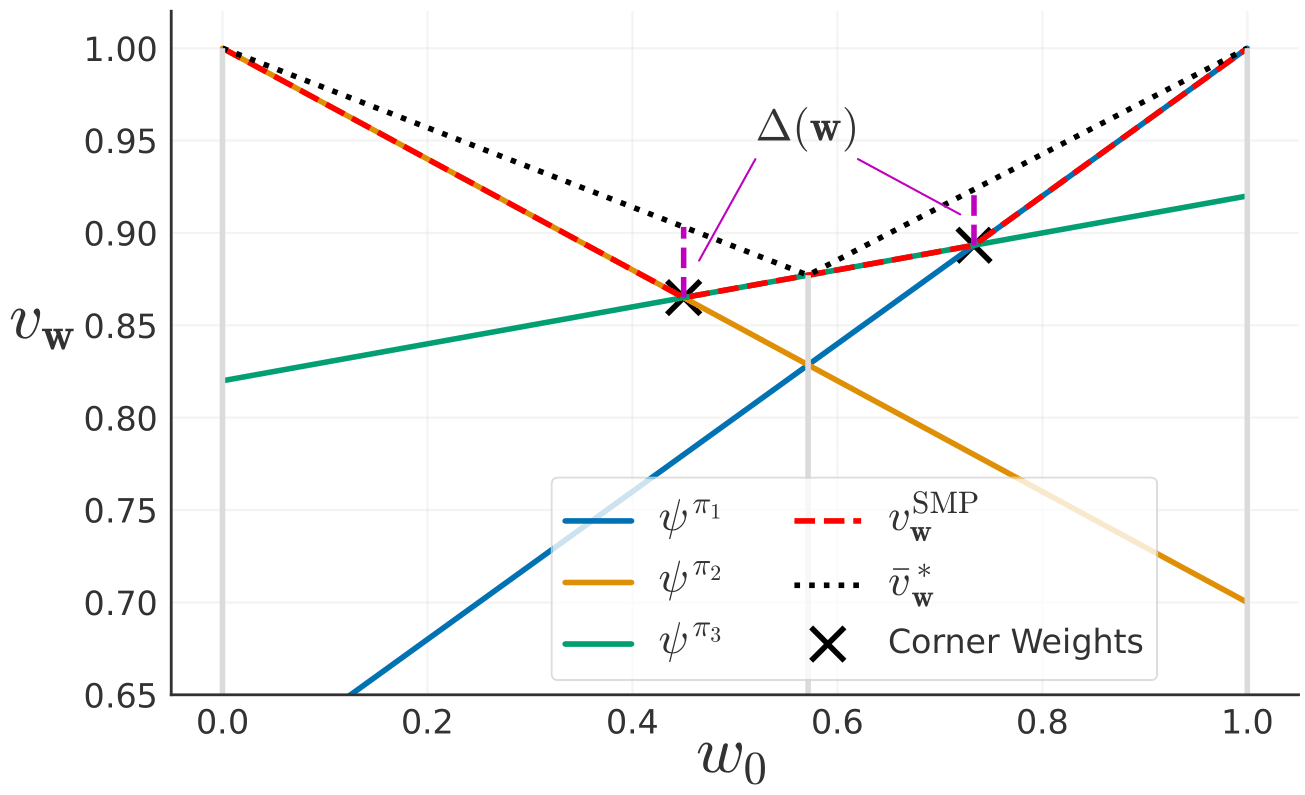
Multi-task reinforcement learning aims to quickly identify solutions for new tasks with minimal or no additional interaction with the environment. Generalized Policy Improvement (GPI) addresses this by combining a set of base policies to produce a new one that is at least as good – though not necessarily optimal – as any individual base policy. Optimality can be ensured, particularly in the linear-reward case, via techniques that compute a Convex Coverage Set (CCS). However, these are computationally expensive and do not scale to complex domains. The Option Keyboard (OK) improves upon GPI by producing policies that are at least as good – and often better. It achieves this through a learned meta-policy that dynamically combines base policies. However, its performance critically depends on the choice of base policies. This raises a key question: is there an optimal set of base policies – an optimal behavior basis – that enables zero-shot identification of optimal solutions for any linear tasks? We solve this open problem by introducing a novel method that efficiently constructs such an optimal behavior basis. We show that it significantly reduces the number of base policies needed to ensure optimality in new tasks. We also prove that it is strictly more expressive than a CCS, enabling particular classes of non-linear tasks to be solved optimally. We empirically evaluate our technique in challenging domains and show that it outperforms state-of-the-art approaches, increasingly so as task complexity increases.
@inproceedings{Alegre+2025,title={Constructing an Optimal Behavior Basis for the Option Keyboard},author={Alegre, Lucas N. and Bazzan, Ana L. C. and Barreto, André and {da Silva}, Bruno C.},booktitle={Proceedings of the Thirty-ninth Conference on Neural Information Processing Systems (NeurIPS)},year={2025},location={San Diego, USA},}
Reinforcement learning (RL) has significantly advanced the control of physics-based and robotic characters that track kinematic reference motion. However, methods typically rely on a weighted sum of conflicting reward functions, requiring extensive tuning to achieve a desired behavior. Due to the computational cost of RL, this iterative process is a tedious, time-intensive task. Furthermore, for robotics applications, the weights need to be chosen such that the policy performs well in the real world, despite inevitable sim-to-real gaps. To address these challenges, we propose a multi-objective reinforcement learning framework that trains a single policy conditioned on a set of weights, spanning the Pareto front of reward trade-offs. Within this framework, weights can be selected and tuned after training, significantly speeding up iteration time. We demonstrate how this improved workflow can be used to perform highly dynamic motions with a robot character. Moreover, we explore how weight-conditioned policies can be leveraged in hierarchical settings, using a high-level policy to dynamically select weights according to the current task. We show that the multi-objective policy encodes a diverse spectrum of behaviors, facilitating efficient adaptation to novel tasks.
@inproceedings{Alegre+2025siggraph,author={Alegre, Lucas N. and Serifi, Agon and Grandia, Ruben and Müller, David and Knoop, Espen and Bächer, Moritz},title={{AMOR}: Adaptive Character Control through Multi-Objective Reinforcement Learning},booktitle={Proceedings of the 52nd Annual Conference on Computer Graphics and Interactive Techniques (SIGGRAPH)},year={2025},location={Vancouver, Canada},}
In this work, we introduce Successor Clusters (SCs), a novel method for tackling unsupervised zero-shot reinforcement learning (RL) problems. The goal in this setting is to directly identify policies capable of optimizing any given reward functions without requiring further learning after an initial reward-free training phase. Existing state-of-the-art techniques leverage Successor Features (SFs)—functions capable of characterizing a policy’s expected discounted sum of a set of d reward features. Importantly, however, the performance of existing techniques depends critically on how well the reward features enable arbitrary reward functions of interest to be linearly approximated. We introduce a novel and principled approach for constructing reward features and prove that they allow for any Lipschitz reward functions to be approximated arbitrarily well. Furthermore, we mathematically derive upper bounds on the corresponding approximation errors. Our method constructs features by clustering the state space via a novel distance metric quantifying the minimal expected number of timesteps needed to transition between any state pairs. Building on these theoretical contributions, we introduce Successor Clusters (SCs), a variant of the successor features framework capable of predicting the time spent by a policy in different regions of the state space. We demonstrate that, after a pre-training phase, our method can approximate and maximize any new reward functions in a zero-shot manner. Importantly, we also formally show that as the number and quality of clusters increase, the set of policies induced by Successor Clusters converges to a set containing the optimal policy for any new task. Moreover, we show that our technique naturally produces interpretable features, enabling applications such as visualizing the sequence of state regions an agent is likely to visit while solving a task. Finally, we empirically demonstrate that our method outperforms stateof-the-art SF-based competitors in challenging continuous control benchmarks, achieving superior zero-shot performance and lower reward approximation error.
@article{Bagot+2025,title={Successor Clusters: A Behavior Basis for Unsupervised Zero-Shot Reinforcement Learning},author={Bagot, Louis and Alegre, Lucas N. and Latre, Steven and Mets, Kevin and da Silva, Bruno Castro},journal={Transactions on Machine Learning Research},issn={2835-8856},year={2025},}
When solving sequential decision-making problems, humans exhibit different behaviors depending on the problem (or task) they are tasked with solving at a given moment. One of the main challenges in the field of artificial intelligence, and reinforcement learning (RL) in particular, is the development of generalist and flexible agents that are capable of solving multiple tasks—each requiring the agent to learn a potentially new, specialized behavior. Importantly, tackling this challenge requires agents to learn behaviors that may involve optimizing a single objective, or trading off between multiple conflicting objectives. We argue that many important real-world tasks are naturally defined by multiple objectives, which when prioritized differently, may require the agent to adapt its behavior accordingly. In this thesis, we study the problem of how to design flexible RL agents that can, in a sample-efficient manner, adapt their behavior to solve any given tasks—each of which is defined by multiple (possibly conflicting) objectives. The main hypothesis of this thesis is that it is possible to meaningfully combine insights from two apparently disparate sub-fields of machine learning—multi-objective RL and multi-task RL—to design novel and principled techniques to address the problem discussed above. In particular, such insights arise from the fact that both of these fields typically deal with problems where an agent needs to learn multiple behaviors/policies. We introduce new multi-policy methods that empower RL agents to (i) carefully learn multiple behaviors, each specialized in a different task or in tasks in which an agent assigns different priorities (or preferences) to each of its objectives; and (ii) combine previously-learned behaviors to efficiently identify solutions to novel tasks. The methods we investigate and introduce have important theoretical guarantees regarding the optimality of the set of behaviors they identify and their capability of solving new tasks in a zero-shot manner, even in the presence of function approximation errors. We evaluate the proposed methods in various challenging multi-task and multi-objective RL problems and show that our algorithms outperform various current state-of-the-art methods in domains with both discrete and continuous state and action spaces.
@phdthesis{Alegre2025thesis,title={Sample-efficient multi-task and multi-objective reinforcement learning by combining multiple behaviors},url={https://lume.ufrgs.br/handle/10183/290816},school={Universidade Federal do Rio Grande do Sul},author={Alegre, Lucas N.},year={2025},}
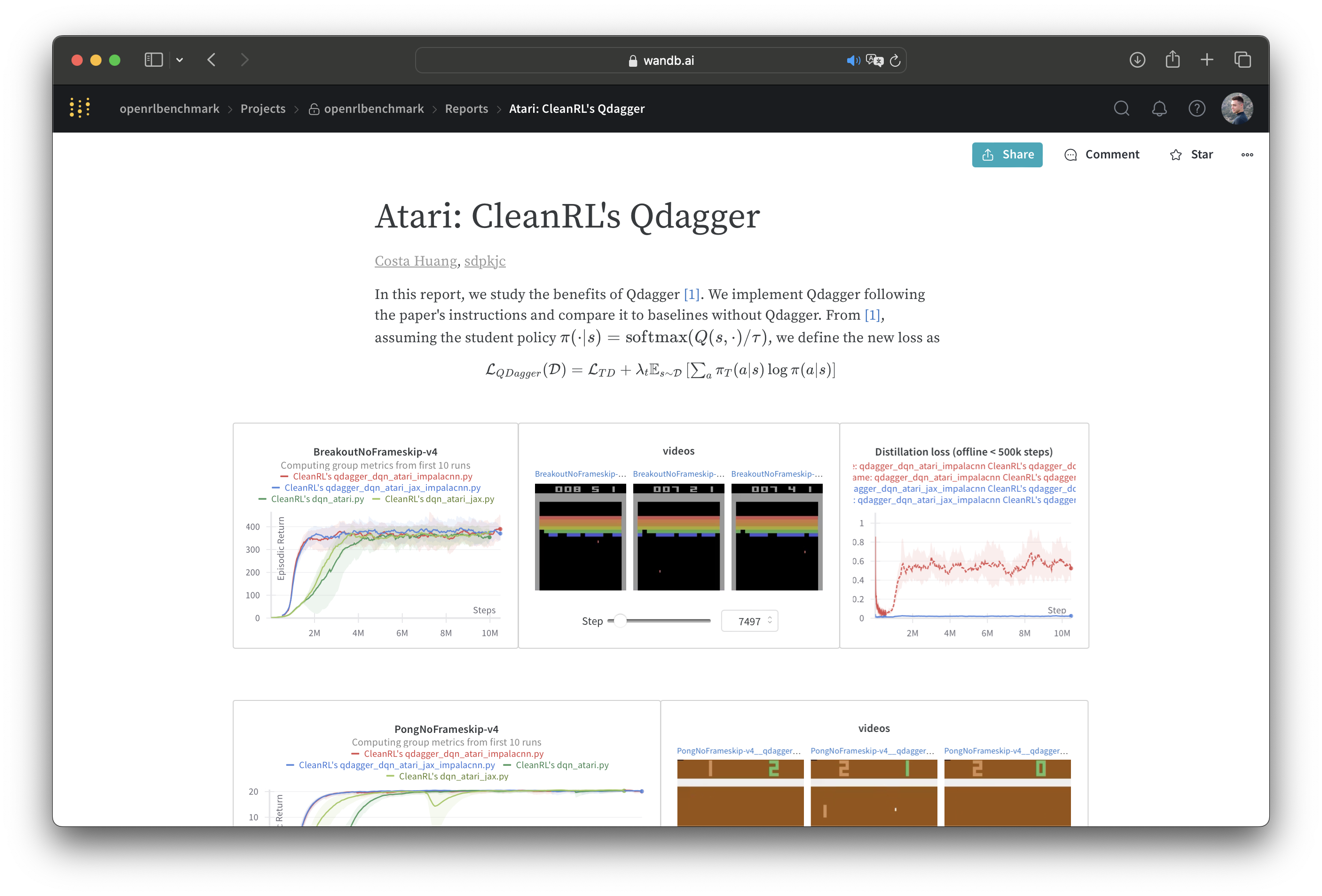
In many Reinforcement Learning (RL) papers, learning curves are useful indicators to measure the effectiveness of RL algorithms. However, the complete raw data of the learning curves are rarely available. As a result, it is usually necessary to reproduce the experiments from scratch, which can be time-consuming and errorprone. We present Open RL Benchmark, a set of fully tracked RL experiments, including not only the usual data such as episodic return, but also all algorithmspecific and system metrics. Open RL Benchmark is community-driven: anyone can download, use, and contribute to the data. At the time of writing, more than 25,000 runs have been tracked, for a cumulative duration of more than 8 years. Open RL Benchmark covers a wide range of RL libraries and reference implementations. Special care is taken to ensure that each experiment is precisely reproducible by providing not only the full parameters, but also the versions of the dependencies used to generate it. In addition, Open RL Benchmark comes with a command-line interface (CLI) for easy fetching and generating figures to present the results. In this document, we include two case studies to demonstratem the usefulness of Open RL Benchmark in practice. To the best of our knowledge, Open RL Benchmark is the first RL benchmark of its kind, and the authors hope that it will improve and facilitate the work of researchers in the field.
@article{Huang+2024,title={Open RL Benchmark: Comprehensive Tracked Experiments for Reinforcement Learning},author={Huang, Shengyi and Gallouédec, Quentin and Felten, Florian and Raffin, Antonin and Dossa, Rousslan Fernand Julien and Zhao, Yanxiao and Sullivan, Ryan and Makoviychuk, Viktor and Makoviichuk, Denys and Danesh, Mohamad H. and Roumégous, Cyril and Weng, Jiayi and Chen, Chufan and Rahman, Md Masudur and Araújo, João G. M. and Quan, Guorui and Tan, Daniel and Klein, Timo and Charakorn, Rujikorn and Towers, Mark and Berthelot, Yann and Mehta, Kinal and Chakraborty, Dipam and KG, Arjun and Charraut, Valentin and Ye, Chang and Liu, Zichen and Alegre, Lucas N. and Nikulin, Alexander and Hu, Xiao and Liu, Tianlin and Choi, Jongwook and Yi, Brent},journal={arXiv preprint arXiv:2402.03046},year={2024},}
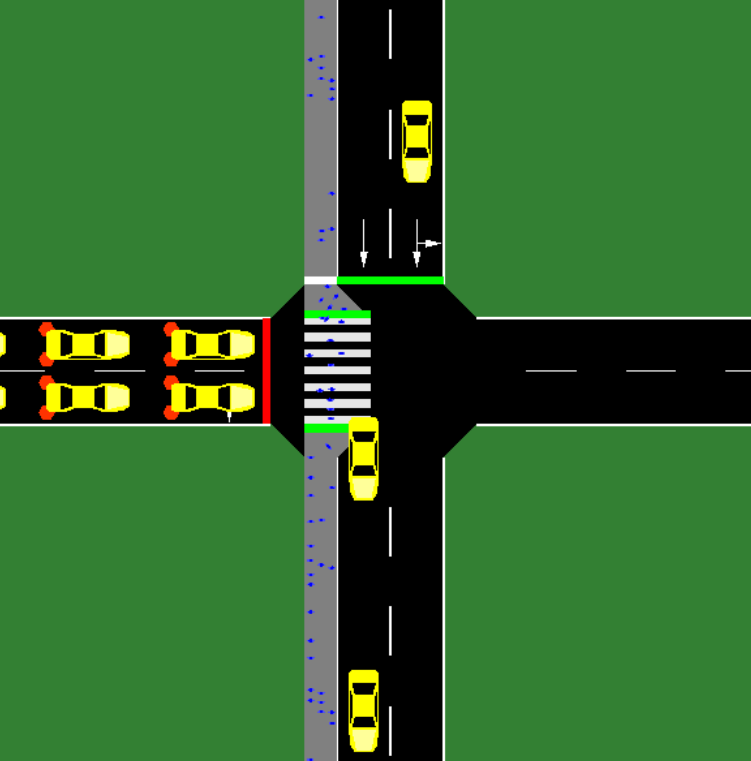
Even though many real-world problems are inherently distributed and multi-objective, most of the reinforcement learning (RL) literature deals with single agents and single objectives. While some of these problems can be solved using a single-agent single-objective RL solution (e.g., by specifying preferences over objectives), there are robustness issues, as well the fact that preferences may change over time, or it might not even be possible to set such preferences. Therefore, a need arises for a way to train multiple agents for any given preference distribution over the objectives. This work thus proposes a multi-objective multi-agent reinforcement learning (MOMARL) method in which agents build a shared set of policies during training, in a decentralized way, and then combine these policies using a generalization of policy improvement and policy evaluation (fundamental operations of RL algorithms) to generate effective behaviors for any possible preference distribution, without requiring any additional training. This method is applied to two different application scenarios: a multi-agent extension of a domain commonly used in the related literature, and traffic signal control, which is more complex, inherently distributed and multi-objective (the flow of both vehicles and pedestrians are considered). Results show that the approach is able to effectively and efficiently generate behaviors for the agents, given any preference over the objectives.
@article{Almeida+2024,author={\relax{de} Almeida, Vicente Nejar and Alegre, Lucas N. and Bazzan, Ana L. C.},title={Knowledge Transfer in Multi-Objective Multi-Agent Reinforcement Learning via Generalized Policy Improvement},journal={Computer Science and Information Systems},year={2024},volume={21},number={1},pages={335--362},doi={10.2298/CSIS221210071A},}
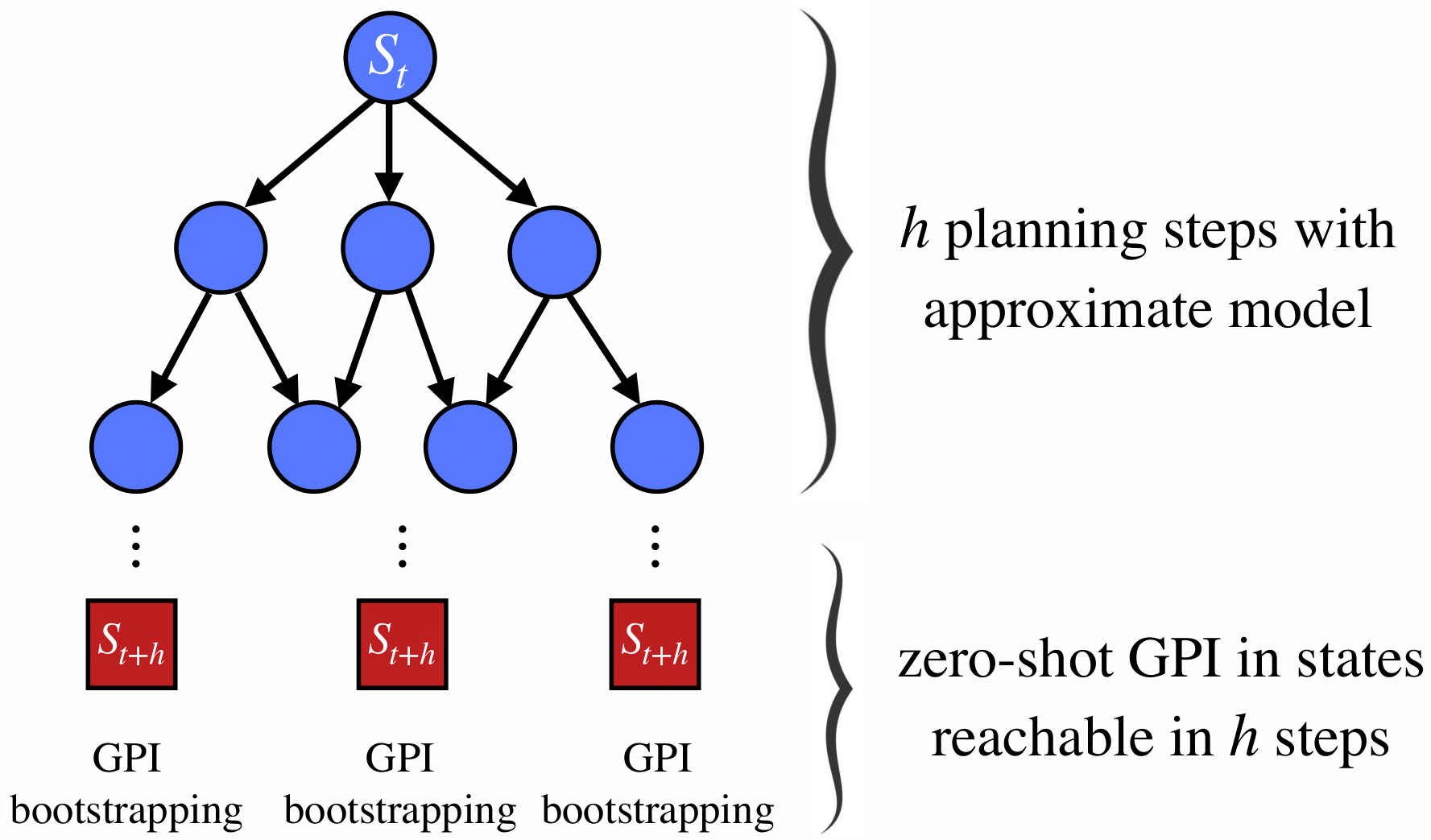
We introduce a principled method for performing zero-shot transfer in reinforcement learning (RL) by exploiting approximate models of the environment. Zero-shot transfer in RL has been investigated by leveraging methods rooted in generalized policy improvement (GPI) and successor features (SFs). Although computationally efficient, these methods are model-free: they analyze a library of policies—each solving a particular task—and identify which action the agent should take. We investigate the more general setting where, in addition to a library of policies, the agent has access to an approximate environment model. Even though model-based RL algorithms can identify near-optimal policies, they are typically computationally intensive. We introduce h-GPI, a multi-step extension of GPI that interpolates between these extremes—standard model-free GPI and full model-based planning—as a function of a parameter, h, regulating the amount of time the agent has to reason. We prove that h-GPI’s performance lower bound is strictly better than GPI’s, and show that h-GPI generally outperforms GPI as h increases. Furthermore, we prove that as h increases, h-GPI’s performance becomes arbitrarily less susceptible to sub-optimality in the agent’s policy library. Finally, we introduce novel bounds characterizing the gains achievable by h-GPI as a function of approximation errors in both the agent’s policy library and its (possibly learned) model. These bounds strictly generalize those known in the literature. We evaluate h-GPI on challenging tabular and continuous-state problems under value function approximation and show that it consistently outperforms GPI and state-of-the-art competing methods under various levels of approximation errors.
@inproceedings{Alegre+2023neurips,author={Alegre, Lucas N. and Bazzan, Ana L. C. and Now{\'e}, Ann and {da Silva}, Bruno C.},title={Multi-Step Generalized Policy Improvement by Leveraging Approximate Models},booktitle={Proceedings of the Thirty-seventh Conference on Neural Information Processing Systems (NeurIPS)},volume={36},location={New Orleans, USA},year={2023},}
Multi-objective reinforcement learning algorithms (MORL) extend standard reinforcement learning (RL) to scenarios where agents must optimize multiple—potentially conflicting—objectives, each represented by a distinct reward function. To facilitate and accelerate research and benchmarking in multi-objective RL problems, we introduce a comprehensive collection of software libraries that includes: (i) MO-Gymnasium, an easy-to-use and flexible API enabling the rapid construction of novel MORL environments. It also includes more than 20 environments under this API. This allows researchers to effortlessly evaluate any algorithms on any existing domains; (ii) MORL-Baselines, a collection of reliable and efficient implementations of state-of-the-art MORL algorithms, designed to provide a solid foundation for advancing research. Notably, all algorithms are inherently compatible with MO-Gymnasium; and (iii) a thorough and robust set of benchmark results and comparisons of MORL-Baselines algorithms, tested across various challenging MO-Gymnasium environments. These benchmarks were constructed to serve as guidelines for the research community, underscoring the properties, advantages, and limitations of each particular state-of-the-art method.
@inproceedings{Felten+2023,author={Felten*, Florian and Alegre*, Lucas N. and Now{\'e}, Ann and Bazzan, Ana L. C. and Talbi, El-Ghazali and Danoy, Gr{\'e}goire and {da Silva}, Bruno C.},title={A Toolkit for Reliable Benchmarking and Research in Multi-Objective Reinforcement Learning},booktitle={Proceedings of the Thirty-seventh Conference on Neural Information Processing Systems (NeurIPS) Track on Datasets and Benchmarks},volume={36},location={New Orleans, USA},year={2023},}
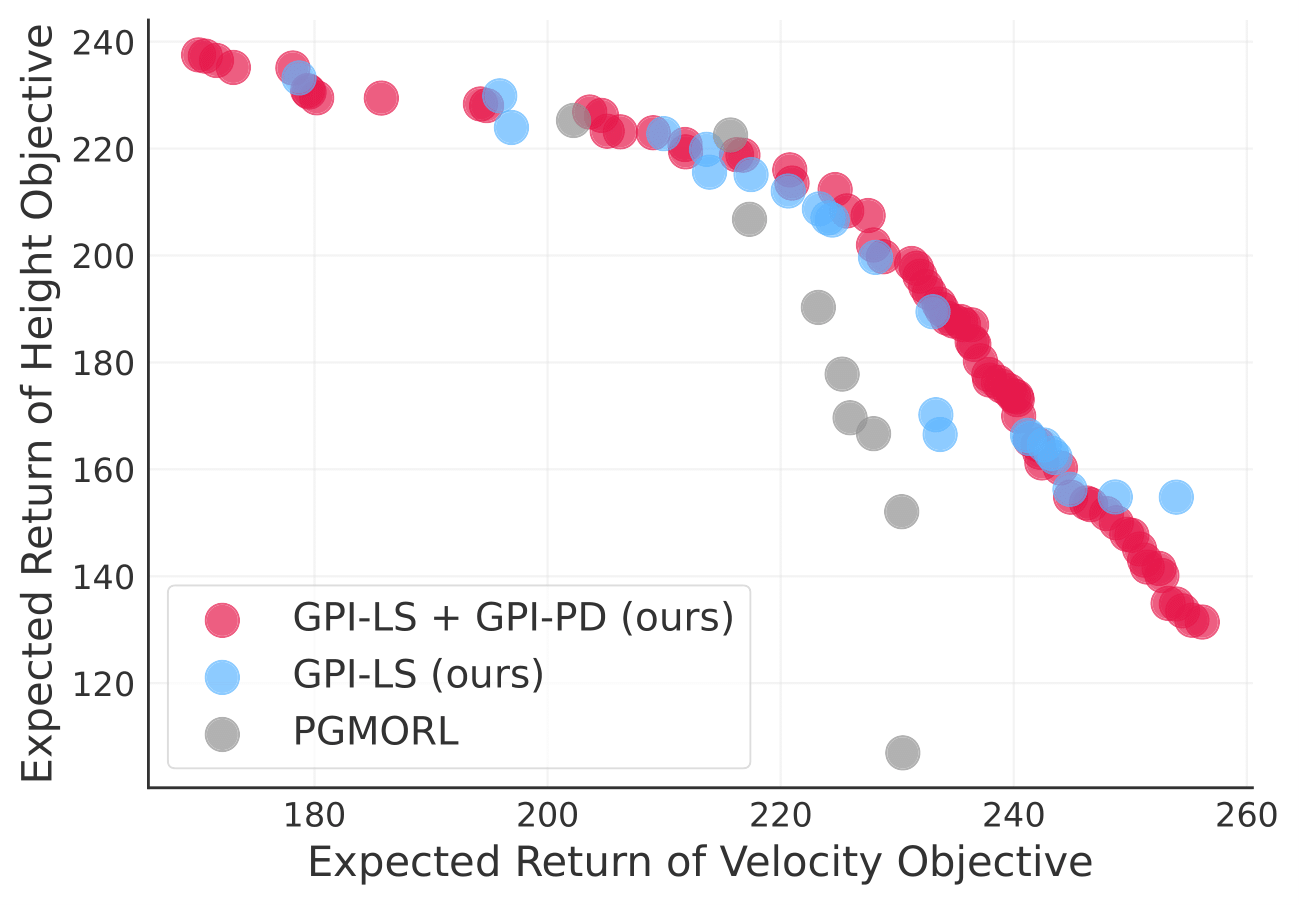
Multi-objective reinforcement learning (MORL) algorithms tackle sequential decision problems where agents may have different preferences over (possibly conflicting) reward functions. Such algorithms often learn a set of policies (each optimized for a particular agent preference) that can later be used to solve problems with novel preferences. We introduce a novel algorithm that uses Generalized Policy Improvement (GPI) to define principled, formally-derived prioritization schemes that improve sample-efficient learning. They implement active-learning strategies by which the agent can (i) identify the most promising preferences/objectives to train on at each moment, to more rapidly solve a given MORL problem; and (ii) identify which previous experiences are most relevant when learning a policy for a particular agent preference, via a novel Dyna-style MORL method. We prove our algorithm is guaranteed to always converge to an optimal solution in a finite number of steps, or an ϵ-optimal solution (for a bounded ϵ) if the agent is limited and can only identify possibly sub-optimal policies. We also prove that our method monotonically improves the quality of its partial solutions while learning. Finally, we introduce a bound that characterizes the maximum utility loss (with respect to the optimal solution) incurred by the partial solutions computed by our method throughout learning. We empirically show that our method outperforms state-of-the-art MORL algorithms in challenging multi-objective tasks, both with discrete and continuous state spaces.
@inproceedings{Alegre+2023,title={Sample-Efficient Multi-Objective Learning via Generalized Policy Improvement Prioritization},author={Alegre, Lucas N. and Roijers, Diederik M. and Now{\'e}, Ann and Bazzan, Ana L. C. and {da Silva}, Bruno C.},booktitle={Proc. of the 22nd International Conference on Autonomous Agents and Multiagent Systems (AAMAS)},year={2023},}
Multiagent Reinforcement Learning (MARL) has been successfully applied as a framework for solving distributed traffic optimization problems. Route choice is a challenging traffic problem in which driver agents must select routes that minimize their own travel times, taking into account the effect caused by other drivers. While MARL algorithms for route choice have been proposed, there is no library that provides a set of benchmarks and algorithms that can be used by researchers in the field. In this paper, we fill this gap by introducing Route Choice Env, a centralized library for MARLbased route choice research. It follows the PettingZoo API, which allows us to provide a standard set of environments and agents for reproducible experimentation. The library is publicly available at https://github.com/ramos-ai/route-choice-env.
@inproceedings{Thomasini+2023,author={Thomasini, Luiz A. and Alegre, Lucas N. and Ramos, Gabriel O. and Bazzan, Ana L. C.},booktitle={Adaptive and Learning Agents Workshop at AAMAS},title={RouteChoiceEnv: a Route Choice Library for Multiagent Reinforcement Learning},year={2023},}
In many real-world applications, reinforcement learning (RL) agents might have to solve multiple tasks, each one typically modeled via a reward function. If reward functions are expressed linearly, and the agent has previously learned a set of policies for different tasks, successor features (SFs) can be exploited to combine such policies and identify reasonable solutions for new problems. However, the identified solutions are not guaranteed to be optimal. We introduce a novel algorithm that addresses this limitation. It allows RL agents to combine existing policies and directly identify optimal policies for arbitrary new problems, without requiring any further interactions with the environment. We first show (under mild assumptions) that the transfer learning problem tackled by SFs is equivalent to the problem of learning to optimize multiple objectives in RL. We then introduce an SF-based extension of the Optimistic Linear Support algorithm to learn a set of policies whose SFs form a convex coverage set. We prove that policies in this set can be combined via generalized policy improvement to construct optimal behaviors for any new linearly-expressible tasks, without requiring any additional training samples. We empirically show that our method outperforms state-of-the-art competing algorithms both in discrete and continuous domains under value function approximation.
@inproceedings{Alegre+2022,title={Optimistic Linear Support and Successor Features as a Basis for Optimal Policy Transfer},author={Alegre, Lucas N. and Bazzan, Ana L. C. and {da Silva}, Bruno C.},booktitle={Proceedings of the 39th International Conference on Machine Learning},pages={394--413},year={2022},editor={Chaudhuri, Kamalika and Jegelka, Stefanie and Song, Le and Szepesvari, Csaba and Niu, Gang and Sabato, Sivan},volume={162},series={Proceedings of Machine Learning Research},publisher={PMLR},}
We introduce MO-Gym, an extensible library containing a diverse set of multi-objective reinforcement learning environments. It introduces a standardized API that facilitates conducting experiments and performance analyses of algorithms designed to interact with multiobjective Markov decision processes. Importantly, it extends the widelyused OpenAI Gym API, allowing the reuse of algorithms and features that are well-established in the reinforcement learning community. MOGym is available at: https://github.com/LucasAlegre/mo-gym.
@inproceedings{Alegre+2022bnaic,author={Alegre, Lucas N. and Felten, Florian and Talbi, El-Ghazali and Danoy, Gr{\'e}goire and Now{\'e}, Ann and Bazzan, Ana L. C. and {da Silva}, Bruno C.},title={{MO-Gym}: A Library of Multi-Objective Reinforcement Learning Environments},booktitle={Proceedings of the 34th Benelux Conference on Artificial Intelligence BNAIC/Benelearn 2022},year={2022},}
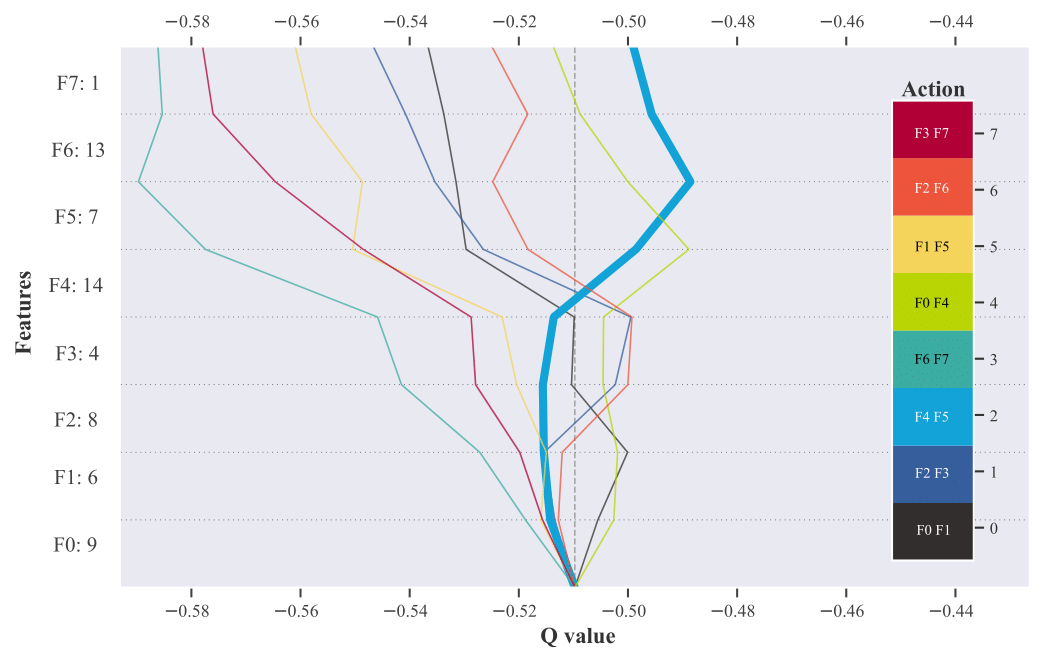
With fast increasing urbanization levels, adaptive traffic signal control methods have great potential for optimizing traffic jams. In particular, deep reinforcement learning (RL) approaches have been shown to be able to outperform classic control methods. However, deep RL algorithms are often employed as black boxes, which limits their use in the real-world as the decisions made by the agents can not be properly explained. In this paper, we compare different function approximations methods used to estimate de action-value function of RL-based traffic controllers. In particular, we compare (i) their expressiveness, based on the resulting performance of the learned policies, and (ii) their explainability capabilities. To explain the decisions of each method, we use Shapley Additive Explanations (SHAP) to show the impact of the agent’s state features on each possible action. This allows us to explain the learned policies with a single image, enabling an understanding of how the agent behaves in the face of different traffic conditions. In addition, we discuss the application of post-hoc explainability models in the context of adaptive traffic signal control, noting their potential and pointing out some of their limitations. Comparing our resulting methods to state-of-the-art adaptive traffic signal controllers, we saw significant improvements in travel time, speed score, and throughput in two different scenarios based on real traffic data.
@inproceedings{Schreiber+2022,author={Schreiber, Lincoln V. and Alegre, Lucas N. and Bazzan, Ana L. C. and Ramos, Gabriel O.},booktitle={2022 International Joint Conference on Neural Networks (IJCNN)},title={On the Explainability and Expressiveness of Function Approximation Methods in RL-Based Traffic Signal Control},year={2022},pages={01--08},doi={10.1109/IJCNN55064.2022.9892422},}
Non-stationary environments are challenging for reinforcement learning algorithms. If the state transition and/or reward functions change based on latent factors, the agent is effectively tasked with optimizing a behavior that maximizes performance over a possibly infinite random sequence of Markov Decision Processes (MDPs), each of which drawn from some unknown distribution. We call each such MDP a context. Most related works make strong assumptions such as knowledge about the distribution over contexts, the existence of pre-training phases, or a priori knowledge about the number, sequence, or boundaries between contexts. We introduce an algorithm that efficiently learns policies in non-stationary environments. It analyzes a possibly infinite stream of data and computes, in real-time, high-confidence change-point detection statistics that reflect whether novel, specialized policies need to be created and deployed to tackle novel contexts, or whether previously-optimized ones might be reused. We show that (i) this algorithm minimizes the delay until unforeseen changes to a context are detected, thereby allowing for rapid responses; and (ii) it bounds the rate of false alarm, which is important in order to minimize regret. Our method constructs a mixture model composed of a (possibly infinite) ensemble of probabilistic dynamics predictors that model the different modes of the distribution over underlying latent MDPs. We evaluate our algorithm on high-dimensional continuous reinforcement learning problems and show that it outperforms state-of-the-art (model-free and model-based) RL algorithms, as well as state-of-the-art meta-learning methods specially designed to deal with non-stationarity.
@inproceedings{Alegre+2021aamas,title={Minimum-Delay Adaptation in Non-Stationary Reinforcement Learning via Online High-Confidence Change-Point Detection},author={Alegre, Lucas N. and Bazzan, Ana L. C. and {da Silva}, Bruno C.},booktitle={Proceedings of the 20th International Conference on Autonomous Agents and Multiagent Systems (AAMAS)},location={Virtual Event, United Kingdom},year={2021},pages={97--105},isbn={9781450383073},publisher={International Foundation for Autonomous Agents and Multiagent Systems},address={Richland, SC},note={Best Paper Award at LXAI Workshop @ ICML 2021}}
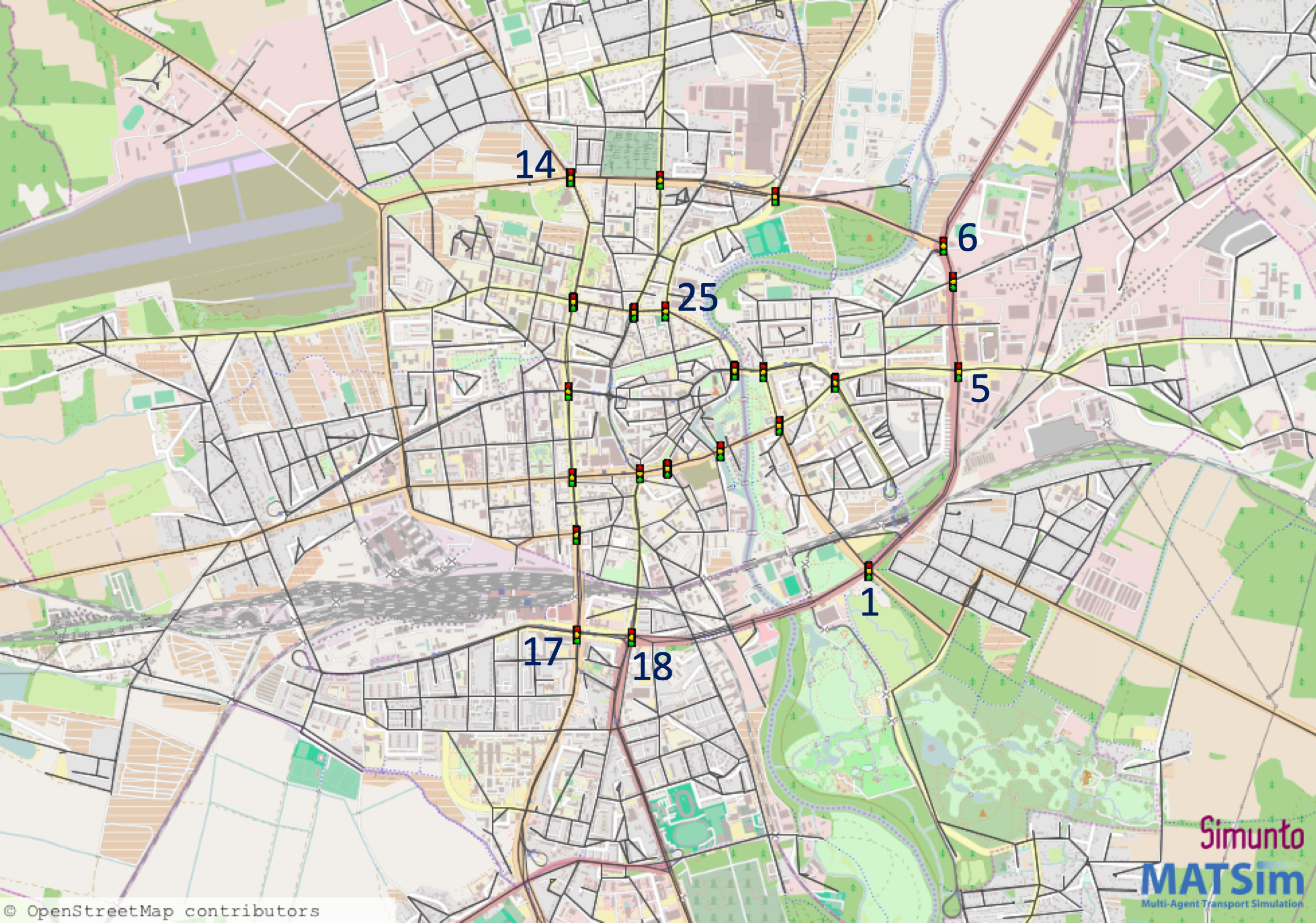
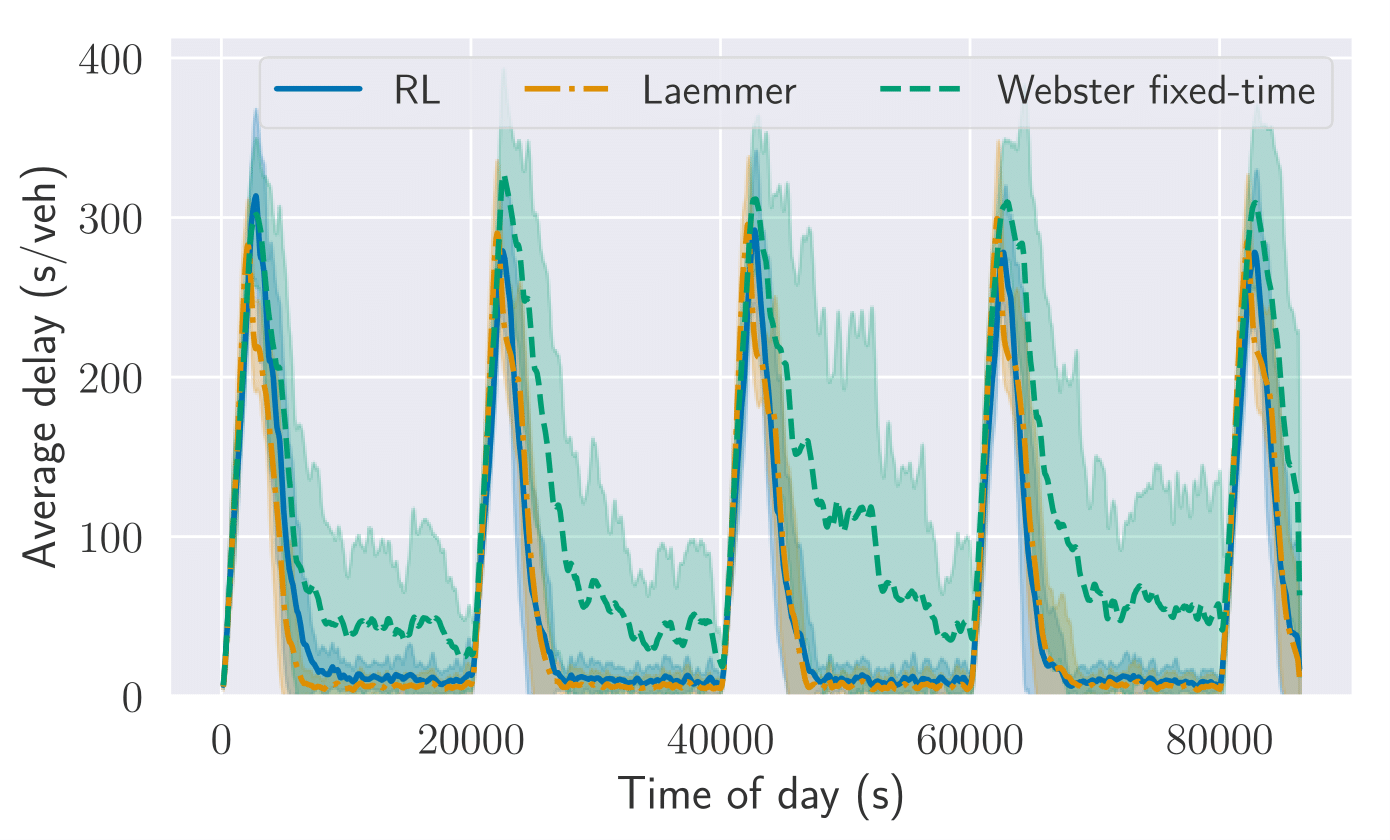
Reinforcement learning is an efficient, widely used machine learning technique that performs well in problems with a reasonable number of states and actions. This is rarely the case regarding control-related problems, as for instance controlling traffic signals, where the state space can be very large. One way to deal with the curse of dimensionality is to use generalization techniques such as function approximation. In this paper, a linear function approximation is used by traffic signal agents in a network of signalized intersections. Specifically, a true online SARSA (λ) algorithm with Fourier basis functions (TOS(λ)-FB) is employed. This method has the advantage of having convergence guarantees and error bounds, a drawback of non-linear function approximation. In order to evaluate TOS(λ)-FB, we perform experiments in variations of an isolated intersection scenario and a scenario of the city of Cottbus, Germany, with 22 signalized intersections, implemented in MATSim. We compare our results not only to fixed-time controllers, but also to a state-of-the-art rule-based adaptive method, showing that TOS(λ)-FB shows a performance that is highly superior to the fixed-time, while also being at least as efficient as the rule-based approach. For more than half of the intersections, our approach leads to less congestion and delay, without the need for the knowledge that underlies the rule-based approach.
@article{Alegre+2021its,author={Alegre, Lucas N. and Ziemke, Theresa and Bazzan, Ana L. C.},title={Using Reinforcement Learning to Control Traffic Signals in a Real-World Scenario: an Approach Based on Linear Function Approximation},journal={IEEE Transactions on Intelligent Transportation Systems},pages={},doi={10.1109/TITS.2021.3091014},year={2021},}
Reinforcement learning is an efficient, widely used machine learning technique that performs well when the state and action spaces have a reasonable size. This is rarely the case regarding control-related problems, as for instance controlling traffic signals. Here, the state space can be very large. In order to deal with the curse of dimensionality, a rough discretization of such space can be employed. However, this is effective just up to a certain point. A way to mitigate this is to use techniques that generalize the state space such as function approximation. In this paper, a linear function approximation is used. Specifically, SARSA(λ) with Fourier basis features is implemented to control traffic signals in the agent-based transport simulation MATSim. The results are compared not only to trivial controllers such as fixed-time, but also to state-of-the-art rule-based adaptive methods. It is concluded that SARSA(λ) with Fourier basis features is able to outperform such methods, especially in scenarios with varying traffic demands or unexpected events.
@article{Ziemke+2021,author={Ziemke, Theresa and Alegre, Lucas N. and Bazzan, Ana L. C.},title={Reinforcement Learning vs. Rule-Based Adaptive Traffic Signal Control: A Fourier Basis Linear Function Approximation for Traffic Signal Control},journal={AI Communications},year={2021},pages={89--103},doi={10.3233/AIC-201580},}
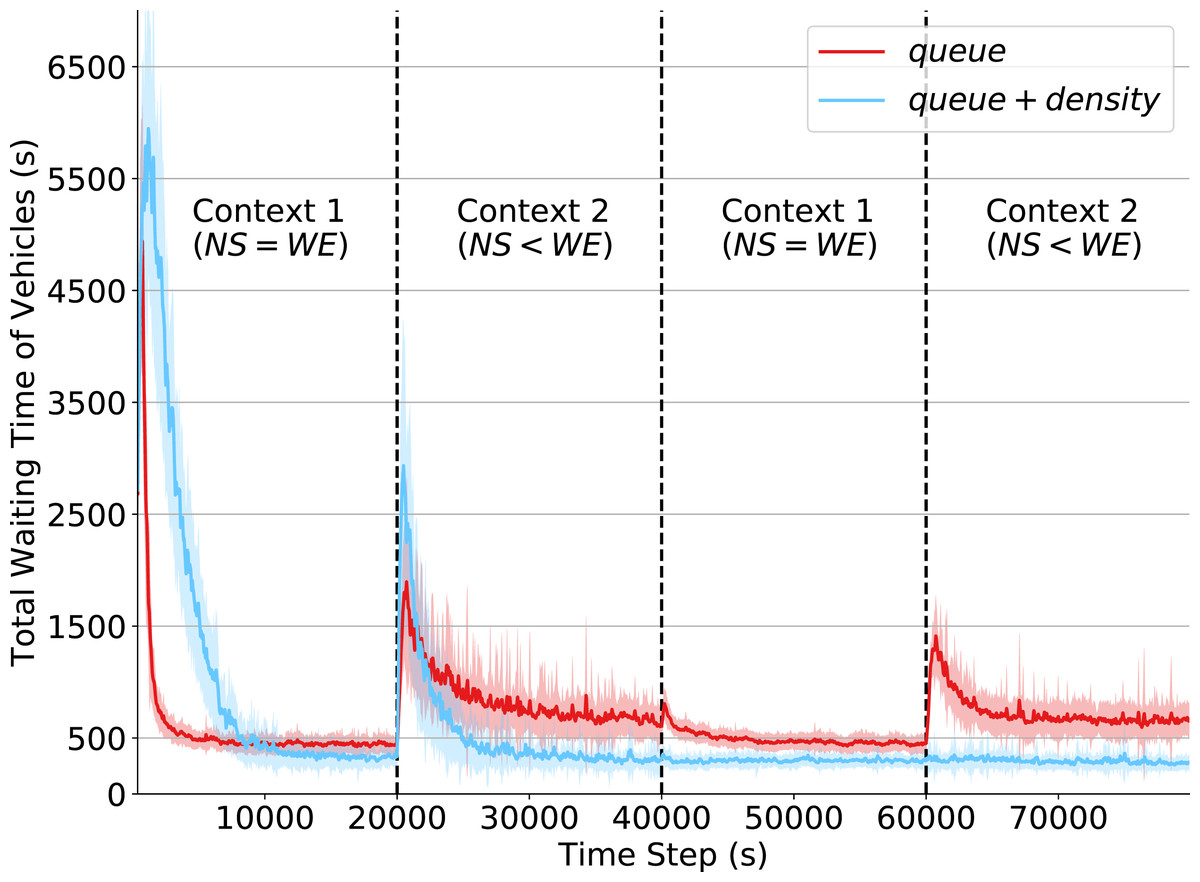
In reinforcement learning (RL), dealing with non-stationarity is a challenging issue. However, some domains such as traffic optimization are inherently non-stationary. Causes for and effects of this are manifold. In particular, when dealing with traffic signal controls, addressing non-stationarity is key since traffic conditions change over time and as a function of traffic control decisions taken in other parts of a network. In this paper we analyze the effects that different sources of non-stationarity have in a network of traffic signals, in which each signal is modeled as a learning agent. More precisely, we study both the effects of changing the context in which an agent learns (e.g., a change in flow rates experienced by it), as well as the effects of reducing agent observability of the true environment state. Partial observability may cause distinct states (in which distinct actions are optimal) to be seen as the same by the traffic signal agents. This, in turn, may lead to sub-optimal performance. We show that the lack of suitable sensors to provide a representative observation of the real state seems to affect the performance more drastically than the changes to the underlying traffic patterns.
@article{Alegre+2021peerj,title={Quantifying the Impact of Non-Stationarity in Reinforcement Learning-Based Traffic Signal Control},author={Alegre, Lucas N. and Bazzan, Ana L. C. and {da Silva}, Bruno C.},volume={7},issn={2376-5992},url={http://dx.doi.org/10.7717/peerj-cs.575},doi={10.7717/peerj-cs.575},journal={PeerJ Computer Science},publisher={PeerJ},year={2021},pages={e575},}
We introduce SelfieArt, an interactive technique for performing multi-style transfer for portraits and videos. Our method provides a simple and intuitive way of producing exquisite artistic results that combine multiple styles in a harmonious fashion. It uses face parsing and a multi-style transfer model to apply different styles to the various semantic segments. This is achieved using parameterized soft masks, allowing users to adjust the smoothness of the transitions between stylized regions in real-time. We demonstrate the effectiveness of our solution on a large set of images and videos. Given its flexibility, speed, and quality of results, our solution can be a valuable tool for creative exploration, allowing anyone to transform photographs and drawings in world-class artistic results.
@inproceedings{AlegreOliveira2020,author={Alegre, Lucas N. and Oliveira, Manuel M.},title={SelfieArt: Interactive Multi-Style Transfer for Selfies and Videos with Soft Transitions},booktitle={Proceedings of the 2020 33rd SIBGRAPI Conference on Graphics, Patterns and Images},year={2020},pages={17--22},doi={10.1109/SIBGRAPI51738.2020.00011},}
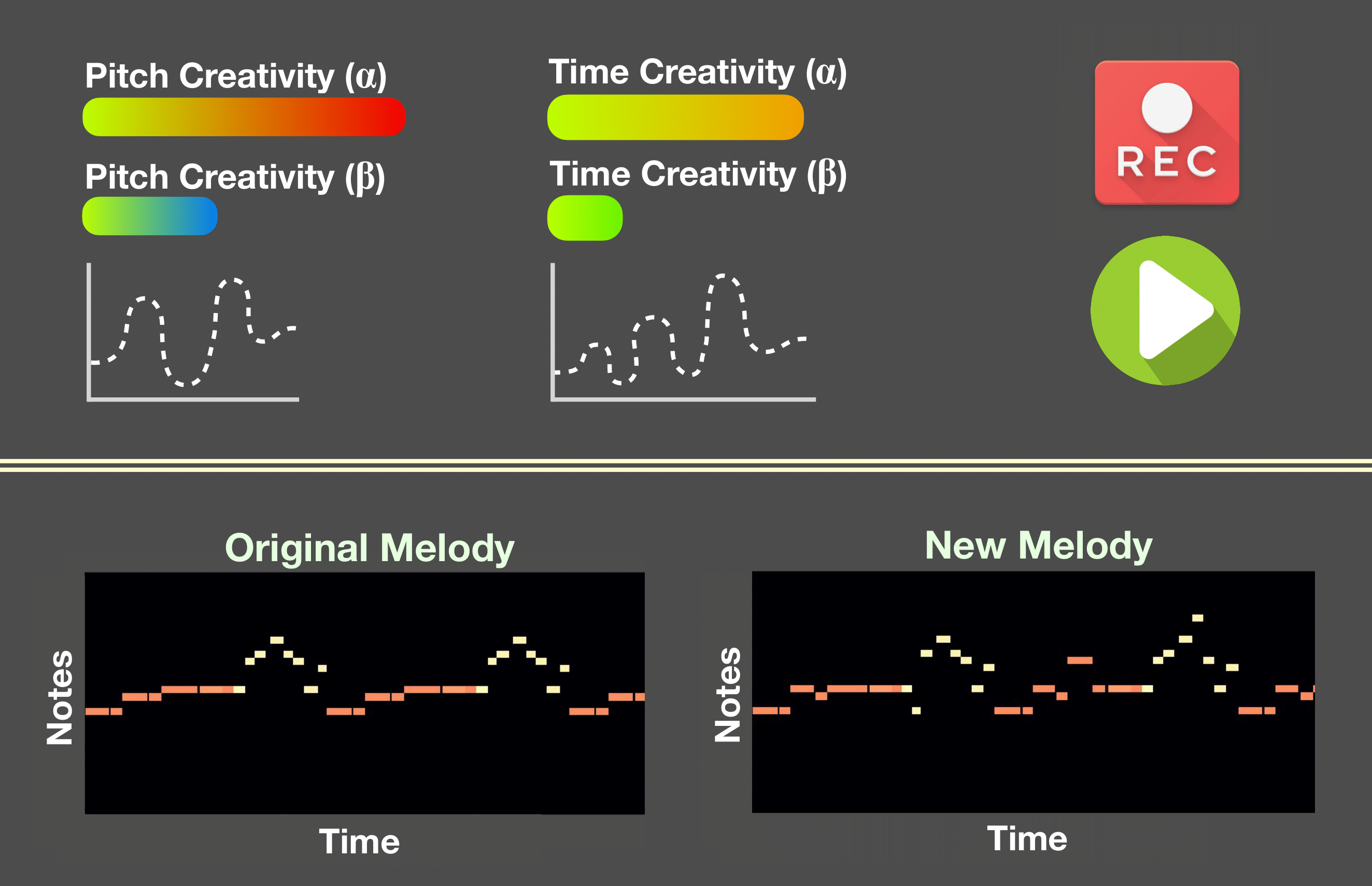
We introduce a machine learning technique to autonomously generate novel melodies that are variations of an arbitrary base melody. These are produced by a neural network that ensures that (with high probability) the melodic and rhythmic structure of the new melody is consistent with a given set of sample songs. We train a Variational Autoencoder network to identify a low-dimensional set of variables that allows for the compression and representation of sample songs. By perturbing these variables with Perlin Noise—a temporally-consistent parameterized noise function—it is possible to generate smoothly-changing novel melodies. We show that (1) by regulating the amount of noise, one can specify how much of the base song will be preserved; and (2) there is a direct correlation between the noise signal and the differences between the statistical properties of novel melodies and the original one. Users can interpret the controllable noise as a type of "creativity knob": the higher it is, the more leeway the network has to generate significantly different melodies. We present a physical prototype that allows musicians to use a keyboard to provide base melodies and to adjust the network’s "creativity knobs" to regulate in real-time the process that proposes new melody ideas.
@inproceedings{weber+2019,author={Weber, Aline and Alegre, Lucas N. and Torresen, Jim and {da Silva}, Bruno C.},booktitle={Proceedings of the International Conference on New Interfaces for Musical Expression},year={2019},}